Noise determination
Noise can be determined from the data point values from the time range of the current signal. Noise is treated in the following ways:
-
as six times the standard deviation (sd) of the linear regression of the drift
as peak-to-peak (drift corrected)
as determined by the ASTM method (ASTM E 685-93)
as the Root Mean Square (RMS) of the linear regression of the drift
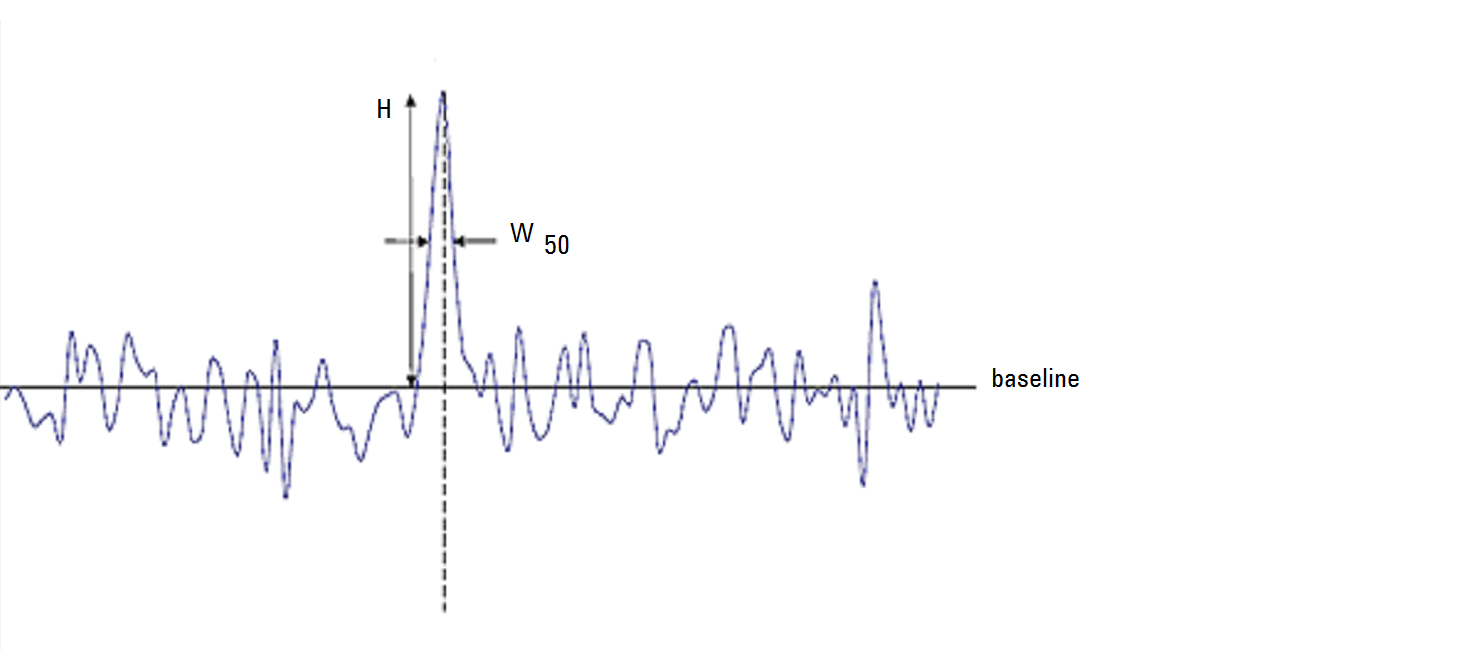
Chromatogram with peak signal and noise
H | Peak height from top to baseline (best straight line through noise) |
|
W50 |
Peak width at half height |
For very small peaks the application may find a retention time that is after peak end, which leads to a negative peak width. In this corner case, no noise value will be computed. |